
Introduction
众所周知,Deep Learning现如今的繁荣,和大数据、GPU和深度学习算法都是离不开关系的。Deep Learning模型参数众多,需要海量的数据进行拟合,否则很容易overfitting到training set上。而现实情况下,我们不一定能很容易地获取大量高质量标注样本,因此,Data Augmentation则起到了非常大的作用了。这便是本文所要讲述的主角。
Mixup
Mixup的核心idea如下:
$$
\tilde{x}=\lambda x_i + (1-\lambda) x_j
$$
$$
\tilde{y}=\lambda y_i + (1-\lambda) y_j
$$
其中,$x_i, x_j$为raw input vectors,$y_i, y_j$为one-hot encodings。
Mixup extends the training distribution by incorporating the prior knowledge that linear interpolations of feature vectors should lead to linear interpolations of the associated targets.
Mixup的PyTorch代码如下,是不是非常简洁?1
2
3
4
5
6
7
8# y1, y2 should be one-hot vectors
for (x1, y1), (x2, y2) in zip(loader1, loader2):
lam = numpy.random.beta(alpha, alpha)
x = Variable(lam * x1 + (1. - lam) * x2)
y = Variable(lam * y1 + (1. - lam) * y2)
optimizer.zero_grad()
loss(net(x), y).backward()
optimizer.step()
What is mixup doing?
The mixup vicinal distribution can be understood as a form of data augmentation that encourages the model $f$ to behave linearly in-between training examples. We argue that this linear behaviour reduces the amount of undesirable oscillations when predicting outside the training examples. Also, linearity is a good inductive bias from the perspective of Occam’s razor, since it is one of the simplest possible behaviors.
mixup is a data augmentation method that consists of only two parts: random convex combination of raw inputs, and correspondingly, convex combination of one-hot label encodings.
Hide-and-Seek
Hide-and-Seek (HaS)可视为一种提高localisation任务的data augmentation方法,其核心思想也非常简单,即在训练阶段,将input image先划分成$S\times S$个grid,然后随机以概率$p$hidden掉一些grid,来消除DCNN仅仅对image中最discriminative parts的强依赖,而是对relevent parts都产生一定的response,从而提高模型在预测阶段的robustness。
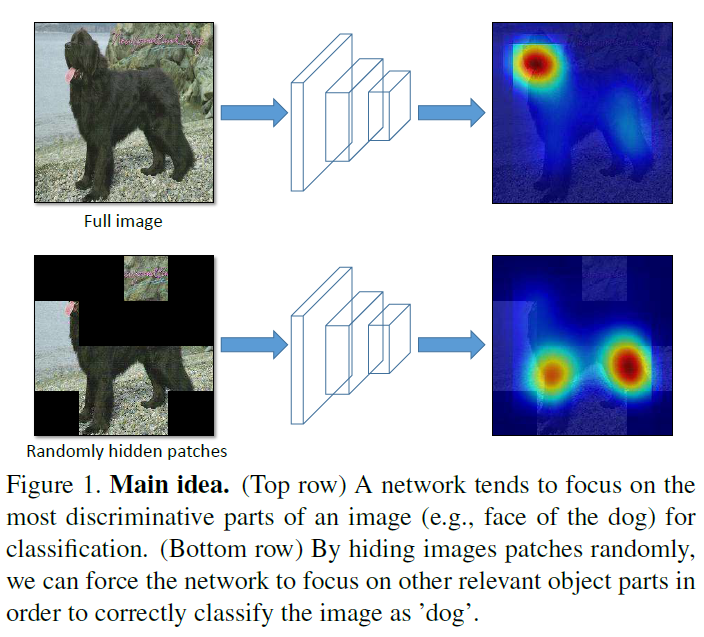
已上图为例,若该image中最discriminative part是dog face,我们在训练阶段从input image中random drop的时候将dog face hidden掉了,那么这样就会迫使模型去寻找其他relevent parts (例如tail和leg)来辅助学习。通过在每个training epoch中随机hidden different parts,模型接受了image不同的parts作为输入,来使得模型关注不同的relevent parts,而不是最discriminative part。
Delving Into HaS
Hiding random image patches
通过randomly hide patches,我们可以保证input image中最discriminative的part并非总是可以被模型get到,既然模型没法总是get到最discriminative的part,那么它自然就会从其他relevent but not that discriminative part中进行学习,从而解决了模型对discriminative part强依赖的缺陷。
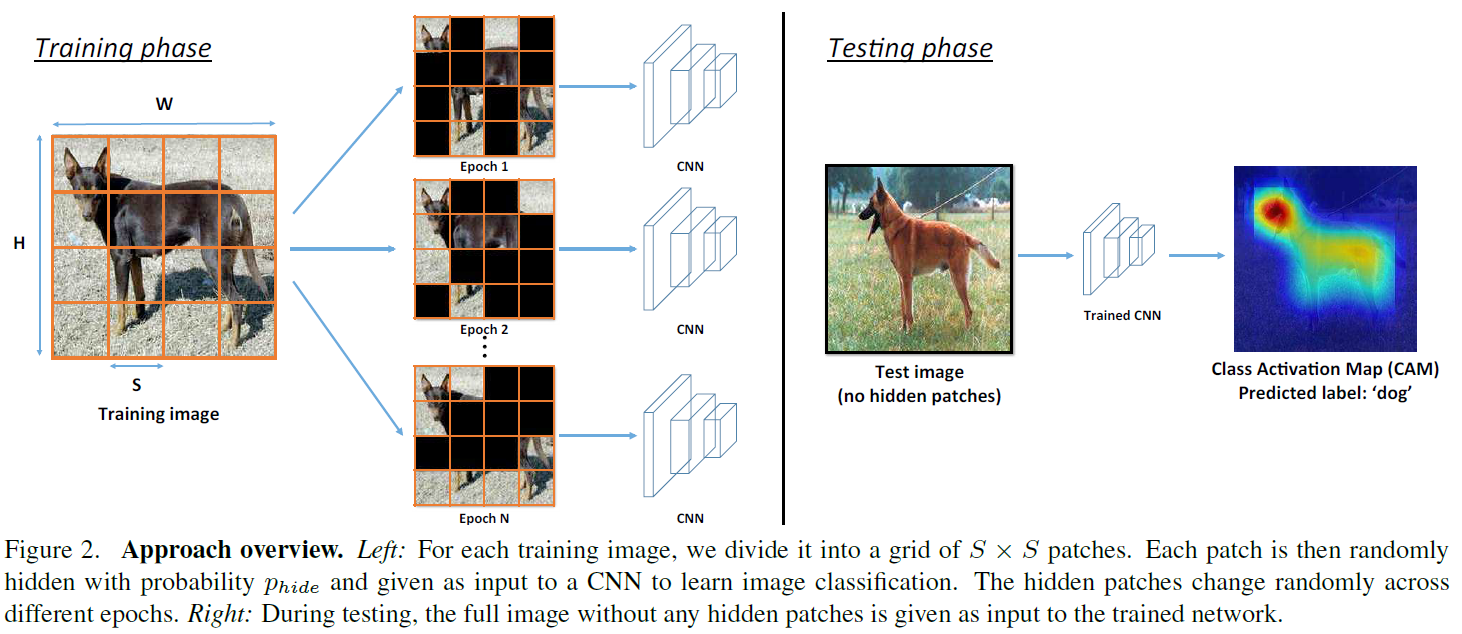
具体来讲,是这样的:给定一张size为 $W\times H\times 3$的 training image $I$,我们首先将其划分为固定size的patches ($S\times S$),然后就得到了一共$(W\times H)/(S\times S)$个patches,然后以概率$p_{hide}$进行patch hiding操作。这样我们就得到了new image $I^{‘}$,来作为classification CNN的输入。在test阶段,将整张图作为输入(不做任何hiding)。
Setting the hidden pixel values
因为training阶段做了patch hiding而test阶段没有,这就存在discrepancy。这就会导致training阶段和test阶段的第一个conv layer activation有不同的distribution。而一个trained network要拥有良好的泛化能力,activiation的distribution应该是大致一样的。也就是说,对于DNN中连接到$x$ units的$w$ weights,$w^Tx$的distribution在training/test阶段应该大致相同。然而,在我们的设定中,因一些patch被hidden,而另一些没有被hidden,因此就不能保证activation distribution大致相同了。
假设size为$K\times K$的conv kernel $F$,对应3-dimensional weights $W=\{w_1,\cdots,w_{k\times k}\}$,应用到一个RGB patch $X=\{x_1,\cdots,x_{k\times k}\}$上。另$v$代表每一个hidden pixel的RGB value。我们可以得到3种activation:
- $F$完全在visible patch中,得到输出$\sum_{i=1}^{k\times k} w_i^T x_i$。
- $F$完全在hidden patch中,得到输出$\sum_{i=1}^{k\times k}w_i^T v$。
- $F$部分位于visible patch,部分位于hidden patch,得到输出$\sum_{m\in visible}w_m^Tx_m + \sum_{n\in hidden}w_n^T v$。
在test阶段,$F$总会位于visible patch中(因为HaS只在training阶段work),因此会输出$\sum_{i=1}^{k\times k}w_i^T x_i$。这种输出仅仅会match到我们上面提到的第一种情况(即$F$完全在visible patch中)。对于后面两种情况,training阶段的activation和test阶段的activation也还是不同。
我们通过将hidden pixel的RGB value设置为整个数据集上图片的mean RGB vector $v=\mu=\frac{1}{N_{pixels}}\sum_j x_j$来解决以上问题。
其中,$N_{pixels}$代表数据集上的所有像素。
我们不妨来分析一下为什么这能work?
根据期望,一个patch的输出和averaged-valued patch的输出应该是一样的:$\mathbb{E}[\sum_{i=1}^{k\times k}w_i^Tx_i]=\sum_{i=1}^{k\times k}w_i^T\mu$。若将$v$换成$\mu$,那么上面提到的第2种和第3种情况的输出都会是$\sum_{i=1}^{k\times k}w_i^T \mu$,然后就会和test阶段的expected output能match上。
文中用到的检测算法属于weakly-supervised detector (即仅仅给定image的category annotation,不给bbox),因此整体framework是基于CAM的,不熟悉的读者可以去阅读CAM的原文。
Analysis
- With dropout: 因dropout随机drop掉了RGB channel pixels,image中最discriminative的information依然可以以很高的可能性被模型get到,因此还是会促使模型更多地关注最discriminative的部分。
- GAP VS GMP: 因为GAP促使模型关注所有的discriminative parts,而GMP只关注最discriminative part。那是否GMP无用呢?实验证明,接入了HaS后的GMP带来了很大的提升,这种improvement可以归因于max pooling对noise更robust。
SamplePairing
Paper: Data Augmentation by Pairing Samples for Images Classification
SamplePairing是Deep Learning领域一篇非常非常简单的paper,简单到几乎小学生都可以看懂。思想和前面的Mixup有点像,但是却更简单,而且数学解释也不如Mixup做得好。
这里就大致讲一下SamplePairing的idea吧:
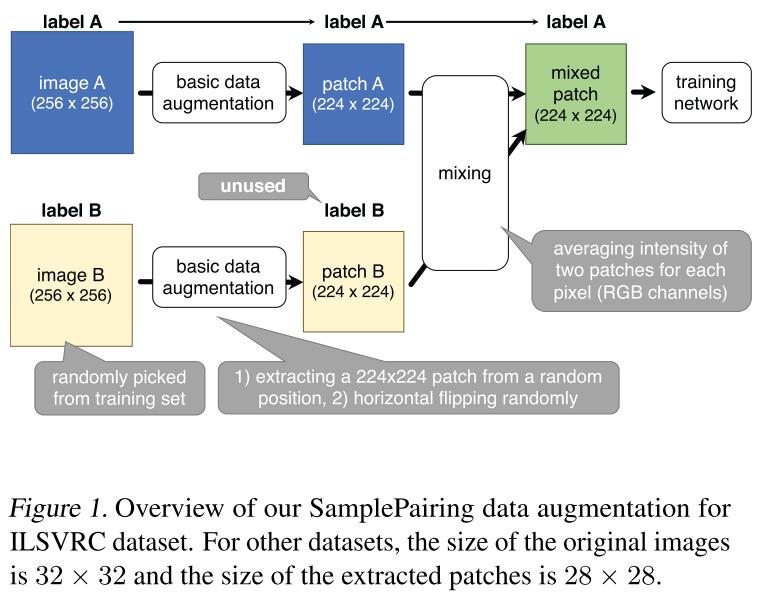
挑选training set中(注:当然也可以从非training set中挑选,但作者做了实验发现从training set中选取的能取得更好的效果)图像$I$与图像$J$,然后合成新样本$I^{‘}=0.5I + 0.5J$,其中新样本$I^{‘}$的label与图像$I$保持一致,这样就可以从$N$个样本中合成$N^2$个样本。如下图所示:
对于算法细节就不多说了,因为实在是太简单。下面介绍一下paper中值得注意的点吧:
- SamplePairing在100分类任务上的效果比1000分类任务上的效果更好。
- SamplePairing增大了training loss,但是却降低了validation loss(很好理解,mix了两个不同label的samples之后,模型在training set上肯定拟合的不如原来好)。
- 关于样本$I$与样本$J$的选择问题:随机从所有category中挑选能取得最好的效果。
- 关于样本$I$与样本$J$的权重设置问题:设置0.5(即equal intensity mix)效果最好。
- 很适合医学图像分析这类样本非常少的分类场景中。
RandomErasing
Paper: Random erasing data augmentation
Code: RandomErasing.PyTorch
这篇也是非常非常简单的paper,核心idea就是在训练过程中挑选图像中一块连续的区域,然后填充随机数值,来使得模型对occlusion更鲁棒。与常见的data augmentation操作Random Crop有以下不同:
- 图像中的object只有一部分被occlude,而overall structure信息是完整的
- erased region被随机填充数值,可视为在图片中添加了noise
算法细节如下图所示,因为太简单就不细说了: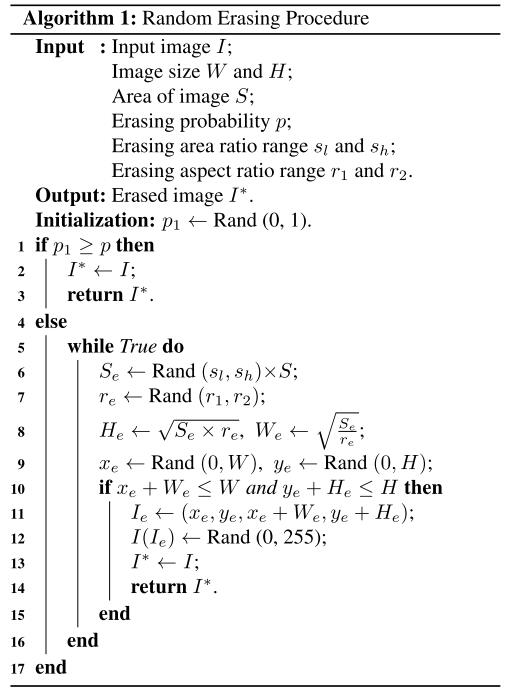
此外,作者在实验中还发现:
- RandomErasing和Random Flipping/Random Crop可以起到complementary的效果,因此可以放心地一起用。
- 填充值为Random Number时能取得最佳效果。
Cutout
Paper: Improved regularization of convolutional neural networks with cutout
又是一篇非常简单的paper,即在input image中随机mask掉一块连续区域来使得模型更好地利用full context image information,而非仅仅那么一小块的specific visual features,思想和Random Erasing其实非常相似。
Dropout被广泛应用于DNN(主要是FC layer和MLP)的regularization中,但是在conv layer却并没有MLP中那么有效,原因主要如下:
- conv layer因parameter sharing机制,参数本来就已经比FC layer少了很多,因此overfitting现象自然比FC layer轻。
- 图像中neighboring pixel共享相同的信息,因此若其中某些pixel被drop掉,那么下一层网络依然可以从neighbor pixel获取相似的信息。
因此,Dropout在conv layer中仅仅起到增强对noisy inputs鲁棒性的作用,而非起到像FC layer中的model averaging effect。
Mask image pixel的方式如下:
- 在每一次epoch中,提取并存储每张图maximally activated feature map
- 在下一个epoch中,upsample上一步存储的feature map到input resolution,再利用feature map的均值来作为mask
此外,作者还发现:
- mask掉的区域不能太大
- 随着category数量的增加,最佳的cutout size逐步变小,原因可能是细粒度分类中context信息并不如object的细节重要
Reference
- Zhang, Hongyi, et al. “mixup: Beyond empirical risk minimization.” International Conference on Learning Representations (2018).
- Kumar Singh, Krishna, and Yong Jae Lee. “Hide-and-seek: Forcing a network to be meticulous for weakly-supervised object and action localization.” Proceedings of the IEEE International Conference on Computer Vision. 2017.
- Inoue, Hiroshi. “Data augmentation by pairing samples for images classification.” arXiv preprint arXiv:1801.02929 (2018).
- Zhong Z, Zheng L, Kang G, et al. Random erasing data augmentation[J]. arXiv preprint arXiv:1708.04896, 2017.
- DeVries T, Taylor G W. Improved regularization of convolutional neural networks with cutout[J]. arXiv preprint arXiv:1708.04552, 2017.
- Yun S, Han D, Oh S J, et al. Cutmix: Regularization strategy to train strong classifiers with localizable features[C]. ICCV, 2019.